カメラロボットを汚染されたトーラス室へ
トーラス室のキャットウォークにロボットを入れて汚染水の漏えい場所を突き止める調査について参考資料が上がってきた。今回は格納容器のドーナツ部分が納められたトーラス室(内部には水が溜まっている)から、タービン建屋など建屋外に向けての漏えい場所を、自走式で伸縮アームを備えた「カメラロボット」とでもいった調査装置で探索するという内容だった。
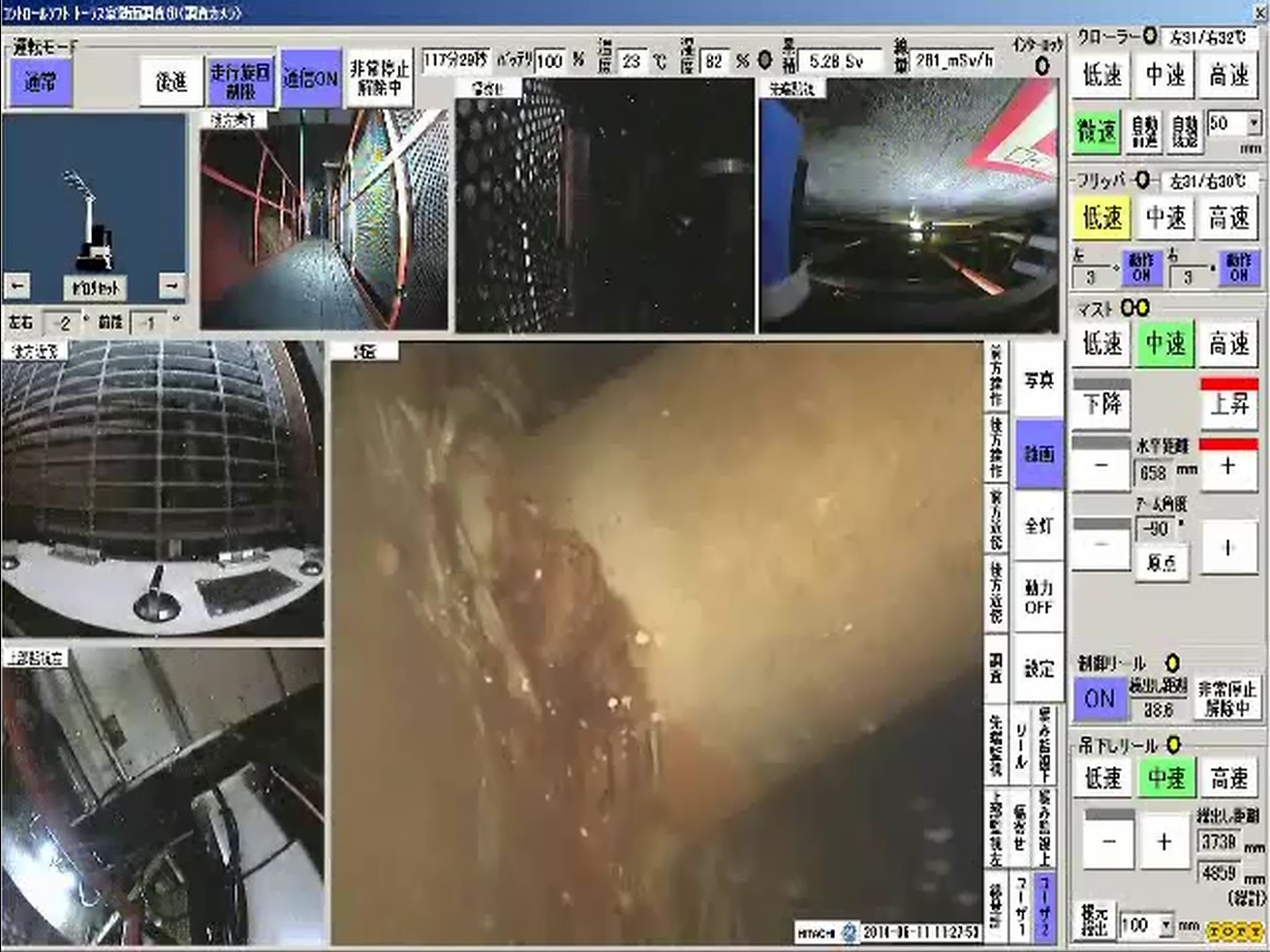
前、後ろ、上方など多くのカメラ映像がまとめられているが、画像の上の方には線量モニタの数字も表示されている。「281mSv/h」というその時点での空間線量もそうとう高いが、左に読みにくい文字で表記された「累積 5.28Sv」というのはもっと驚きの数値だ。もしもこのカメラロボが生身の人間だったら、絶命してもおかしくない線量を累計で受けていることになる。

原子炉建屋から外部への貫通部で漏水箇所を探索
原子力発電所は5重の壁で核物質の外部への漏出をガードしているとされるが、発電を行うためにはどうしても、原子炉内部から外につながる貫通部が必要になる。たとえば原子炉でつくった高温高圧の蒸気をタービンに送る配管、タービン側の復水器で液体に戻された水を原子炉に循環させる配管、そのほか冷却装置に関する配管や温度計やセンサーなどの計装関係の配線・配管……。
これらの貫通部の隙間はシリコンなどで充填されているということだが、原子炉建屋側からタービン建屋側に汚染水が流出しているのは紛れもない事実。原子炉建屋内の汚染水が貫通部にできた損傷から外部に流出していることを疑い、漏洩箇所を探索する目的で実施されたのが今回の調査だ。
調査方法は、キャットウォーク上をキャタピラで移動する調査装置のアームから、カメラを下方向に伸ばし、水中の貫通部分を観察する方法で行われた。ただ、水の動きは目で見えにくいため、粘度系の粒子をトレーサーとして水中に撒き、その動きを観察することで水流を確認するという手法がとられた。
結果は、貫通部の周辺では水流は確認されず。ただし、5カ所を予定していた貫通部の調査のうち3カ所は、干渉物(じゃまな物)があってカメラを下せず。
それでも、トレーサーを撒くことで水流、つまり漏えい箇所を調査できそうだと確認されただけでも御の字といった気分が、東京電力の資料からは伝わってくる。今回の調査で水流が確認されなかったことで、予定していたソナーによる超音波調査は実施しないことも含めて再検討される模様だ。



ん? もしかしてケチってる? それとも汚染がひどくてロボット探査でさえ大変だから省力をはかろうとしているのか。やるべきことはできる時に実施しておいた方がいいと思うのだが。
文●井上良太
![[New!]今日の東電プレスリリース「ここがポイント」](https://rz.potaru.com/t/s/d72/2e/2a/1017649.jpg)
最終更新: