4月10日のニュースでは、東京電力が投入した格納容器の内部を調査するためのロボットが動かせなくなったという話だった。その後13日には、動かなくなったロボットの回収を断念したというニュースが流された。
およそ10数メートル進んだところで… by NHK
ロボットは長さ60センチのヘビのような細長い型をしていて、東京電力によりますと、午前9時半ごろ、格納容器につながる配管からロボットを投入する作業が始まりました。
ところが、東京電力によりますと、格納容器の壁沿いにある足場で「コ」の字型に変形して障害物をよけながら走行していたところ、午後2時すぎ、およそ10数メートル進んだところで動かすことができなくなりました。ロボット自体は操作に反応しているということで、東京電力は、遠隔操作のためのケーブルが障害物に引っかかったか、走行用のベルトが故障した可能性があるとみて原因を調べています。
ロボットが格納容器内で動作不能に | 東京電力 福島第一原発事故 関連ニュース | NHK 40年後の未来へ 福島第一原発の今
回収断念で2台目を投入できず by NHK
東京電力などはロボット本体か遠隔操作用のケーブルが障害物に挟まるなどした可能性があるとみて、搭載されたカメラで周辺の状況を確認するとともに、走行用のベルトを操作したり、遠隔操作用のケーブルを人力で引っ張ったりして復旧を試みていました。
しかし、ロボットは全く動かず改善が見られないことから、12日夜、回収を断念することを決めました。
1号機の格納容器では13日、もう1台のロボットを使って2日目の調査が行われる予定でしたが、格納容器につながる配管には動かなくなったロボットのケーブルが残った状態で、このままでは2台目を投入できないため、東京電力などは13日の調査を延期したうえで、ケーブルを切断することにしています。
福島第一原発 調査ロボットの回収を断念 | 東京電力 福島第一原発事故 関連ニュース | NHK 40年後の未来へ 福島第一原発の今
4月10日の発表は「調査開始速報」 by 東京電力



小型ロボットによる1号機格納容器の調査が行われた日に発表された東京電力の報道配布資料は、「調査開始速報」。計画図と写真が記されただけのものだった。
10日の資料だけでは、ロボットがピンチに陥ったことがまるで分からない。ロボットの動作不良は、記者会見で判明した事実なのかもしれない。
停止状態での周囲状況の確認 by 東京電力
4月11日の「福島第一原子力発電所の状況について(日報)」で、この調査について報告があった。
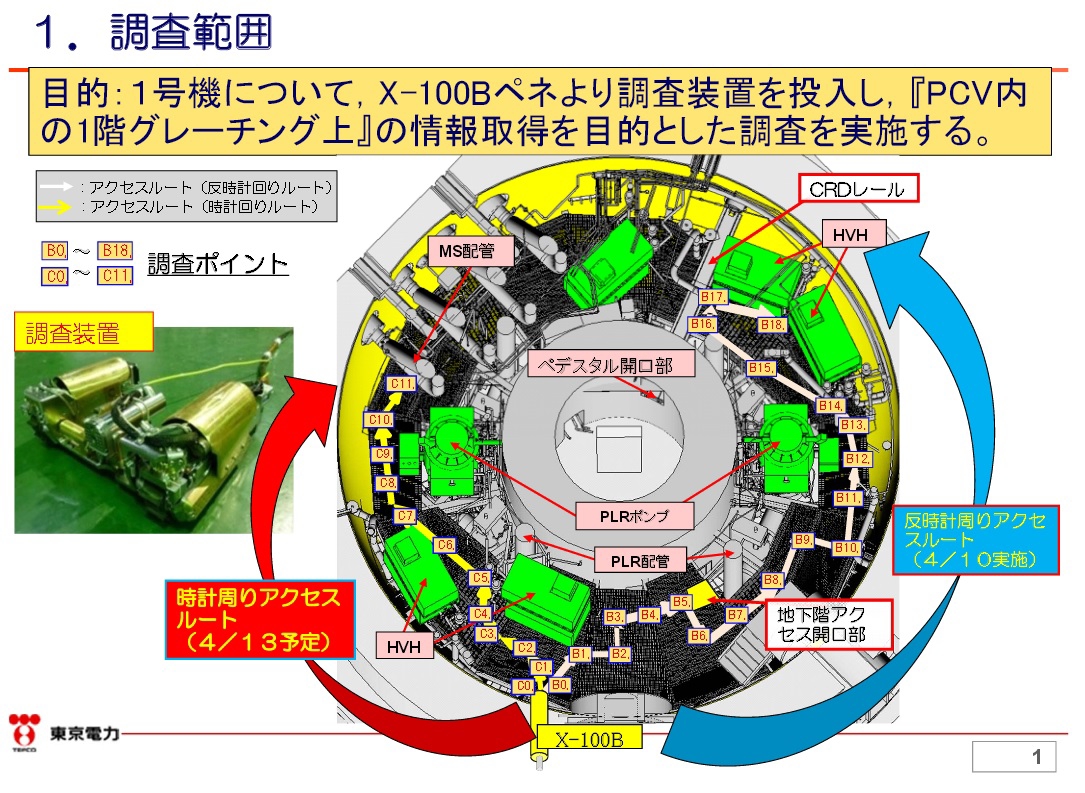
※「原子炉格納容器内部調査技術の開発」における1号機原子炉格納容器内部調査の実証試験として、1号機原子炉格納容器の地下アクセス開口部からの燃料デブリの広がり状況を確認するための事前調査として、1号機原子炉格納容器の中へ初めてロボット(クローラ調査装置)を投入する調査を実施している。
1号機原子炉格納容器内部へのロボットの投入は、初めての試みであり、今回の実証試験で得られた貴重なデータについては、今後に活かしていく。
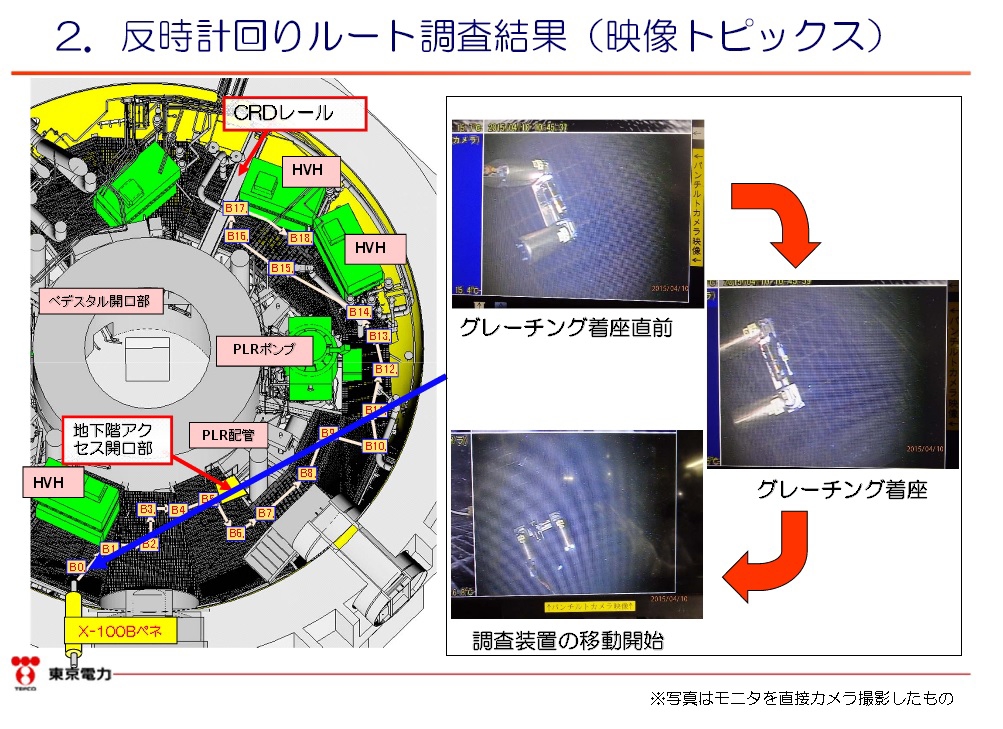
2015年4月10日午前9時25分頃、1号機原子炉格納容器内調査装置の投入作業を開始。同日午前10時45分、調査装置が原子炉格納容器グレーチング上に着き、同日午前11時20分、グレーチング上において調査のための走行を開始。4月10日の調査では、グレーチング上において、約3分の2の調査範囲を走行し、調査ポイントである18箇所のうち、地下アクセス開口部を含んだ14箇所までの調査を実施することができた。同日午後2時9分、調査装置が走行停止状態となったため、同日午後5時30分頃まで復旧作業および原因調査などを行った。
本日(4月11日)も、復旧作業や原因調査の検討を実施するとともに、停止状態での調査装置による周囲状況の確認を行った。
計画では、ロボットは蛇のような筒型状態で直径10センチほどの配管の中を通りぬけ、格納容器の中に入ってからはコの字に変形して、格納容器内の状況を確認。投入箇所から反時計回りに圧力容器周辺を半周する予定だった。
東京電力によると、18カ所の調査ポイントのうち14カ所で調査できたとしている。
ロボットが停止した翌日も、「停止状態で周囲状況の確認」を行ったという辺りに、調査を行った格納容器内の環境の厳しさがにじむ。
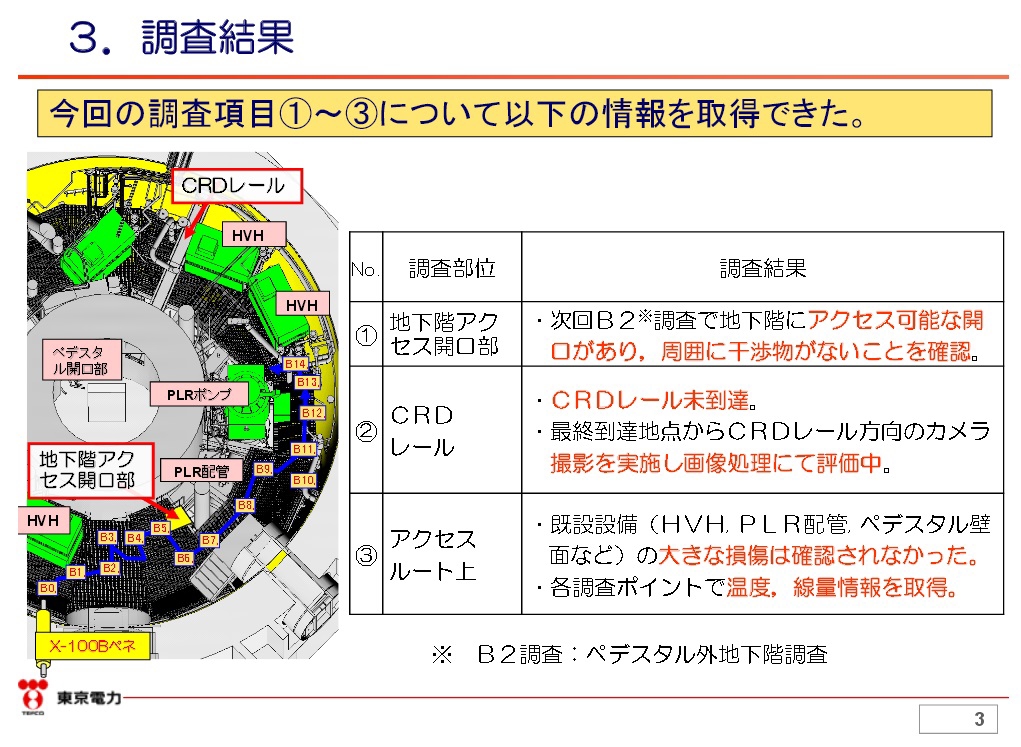
地下階にアクセス可能な開口部 by 東京電力
4月13日付で東京電力は、この件に関して2つ目となる資料「「原子炉格納容器内部調査技術の開発」ペデスタル外側1階グレーチング上調査(B1調査)の現地実証試験の実施について【4月10日実施分】」を発表した。この時点では「日報」での追加記載は行われていない。
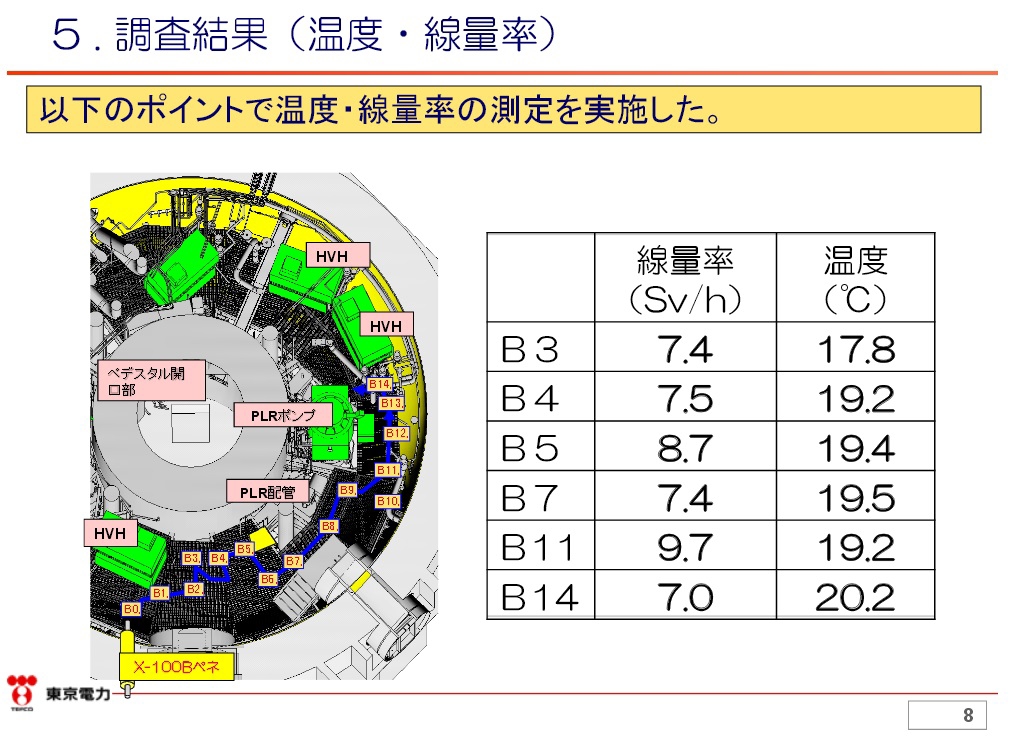
格納容器内部の映像と、ロボットの動きや測定された空間線量や温度なども公表された。資料から読み取れるのは、現状が極めて困難だということだ。
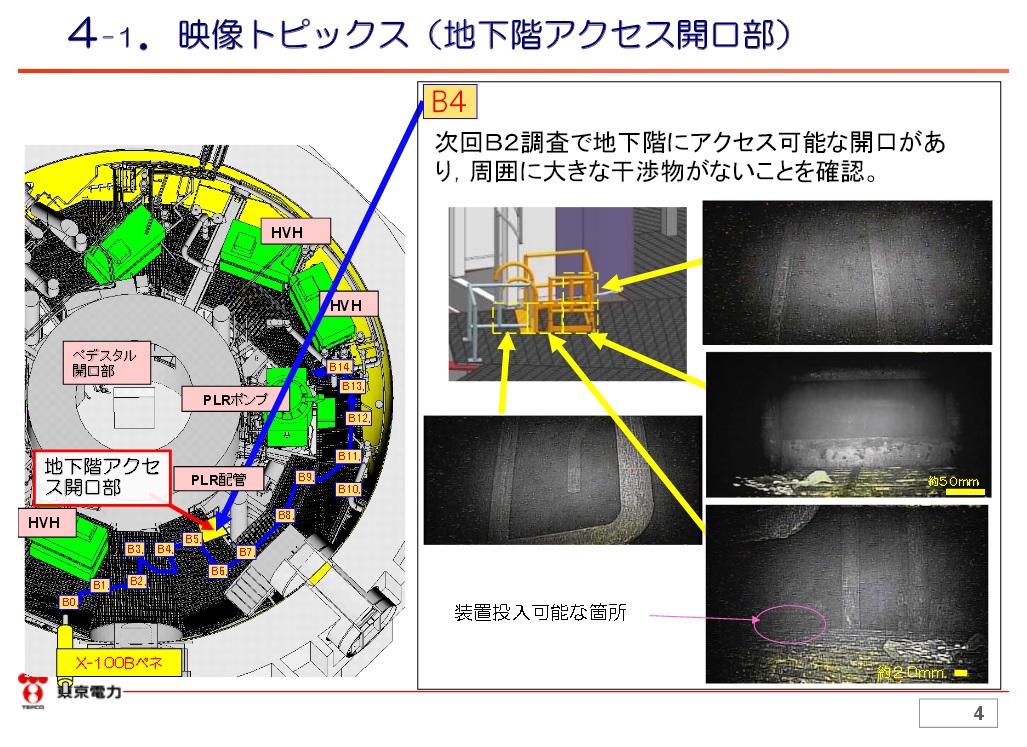
資料で東京電力は「地下階にアクセス可能な開口部が見つかった」と強調しているが、今回のロボットが動かなくなってしまったため、直径約10センチの配管にはロボットのケーブルが残されていて、このままでは2号機を投入することができない状況だ。また、仮に次のロボットを投入できても、今回スタックしてしまったフロアから、さらに階下のフロアへ通路を降りていかなければならないのだ。
メルトスルーした核燃料がどのよな状態にあるのかを確認するためには、格納容器の底まで降りていかなければならない。しかし、現状は格納容器のフラスコの膨らんだ部分で、ロボットが操縦不能になったり、次のロボットの投入について計画を見なおさざるを得ないといった状況だ。廃炉を進めるためには、原子炉の現状を把握しなければ話は前に進まないのはもちろんだが、先は長いと言わざるを得ない。
最終更新: